鲁仕荣,陈 凯,蒋国涛,覃潇东,刘 琦,韩晓宇
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
当前城市轨道交通领域发展迅速,在提供便利和快捷的同时其运营安全性不可忽视。随着列车速度的提高,驾驶员通过肉眼观察路况的难度越来越大,需要一种手段来感知前方的路况,为驾驶员提供安全提示。
目前,城市轨道交通列车间主要是通过信号系统获取线路信息来保障列车的安全运行,其中最有效的方式是列车自动防护(automatic train protection,ATP),其能监控列车之间的距离是否安全,从而实现安全运行和预防碰撞的目的。一部分列车是基于GPS、北斗等卫星定位技术来感知列车位置的,其通过经纬度坐标数据来测算两车的距离,进而避免列车碰撞;
但此技术受卫星信号因素影响较大。极少数列车上安装了类似于汽车专用的高级驾驶辅助系统(advanced driving assistance system,ADAS),其通过毫米波和激光探测障碍物来识别前方车辆,进而实现测距防撞的目的;
但此系统具有成本高、探测距离近等不足。
本文提出一种基于飞行时间(time of flight,TOF)测距的城市轨道交通测距防撞方法,其采用常用的2.4 GHz 通信频段进行设备间通信,以感知前方、侧方车辆以及轨旁设备的状态;
同时结合列车的运行线路情况、上下行信息、制动距离等工况信息给出合理预警信号,从而保证车辆的安全运行。
2.4 GHz 频段通信是一种开源使用的无线传输技术。此频段下使用的设备主要有ZigBee、WiFi、蓝牙及其他常用的USB无线设备[1]。本文提出一种具有传输距离远、节点容量大、功耗低等优势的远距离无线电(long range radio,Lora)通信技术,其使用2.4 GHz(2.4~2.483 5 GHz)频段,以线性调频扩频(chirp spread spectrum,CSS)为调制方式。较其他的通信方式而言,其远距离通信的能力以及借助扩频技术实现的前向纠错能力为远距离测距提供了可能。
TOF 测距是一种双向测距技术,其利用数据信号在一对收发机之间往返的飞行时间来测量两点间的距离。将发射端发出数据信号与接收到接收端应答信号的时间间隔记为Tt[2],接收端收到发射端的数据信号与发出应答信号的时间间隔记为Tr,如图1所示。信号在这对收发机之间的单向飞行时间Tf=(Tt-Tr)/2,则两点间的距离d=c*Tf,其中c表示电磁波传播速度[3]。

图1 TOF 测距原理Fig. 1 TOF ranging principle
2.1 技术原理
本文所述的测距设备主要分为主设备和从设备2类。主设备主动发送信号,从设备被动应答,且主从设备可灵活切换。
主设备通过眨眼(Blink)脉冲结合对称双面双向测距技术实现主从设备之间的距离测算。
2.1.1 眨眼脉冲
主设备会主动发出眨眼信号。该信号类似一个广播脉冲信号,主要用于测距请求;
脉冲持续时间为300 μs,其余时间为静默时间,以保证其他设备的信号传输(图2)。眨眼信号的间隔时间可以根据应用需求定义。每一次眨眼信号中主要包含128 个字节的数据,这些字节中包含了设备节点用于身份识别的唯一ID。其他设备一旦收到此数据,即可解析出发出此数据的设备的身份信息。

图2 眨眼脉冲信号Fig. 2 Blink pulse signal
眨眼信号通过多路径跳频技术以及载波侦听多路访 问/冲 突 检 测(carrier sense multiple access with collision detection,CSMA)技术避免多设备之间信号干扰的问题。如图3 所示,在2.401~2.483 GHz 之间可以分出数十条频段通道,眨眼信号可以利用跳频技术在空闲频段进行传输,从而避免多重信号碰撞干扰[4]。
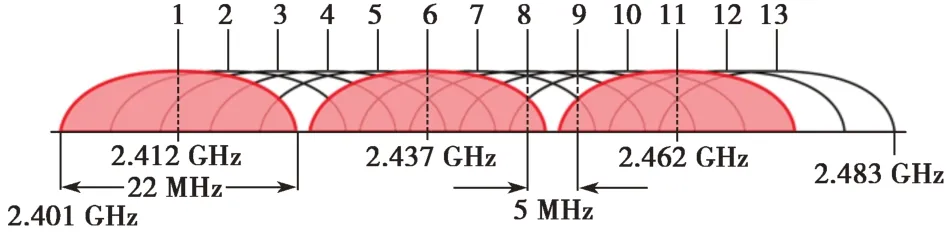
图3 眨眼脉冲多路径方式Fig. 3 Blink pulse multipath way
2.1.2 SDS‐TWR测距技术
对称双面双向测距(symmetrical double‐sided two way ranging,SDS‐TWR)技术在一个完整的测距周期内进行两次测距。其由两个测距节点分别逐个发起一次测距,测得的距离数据量是往常测距数据量的2倍,更多的数据有助于提高测距精度[5]。
SDS‐TWR 在双向测距(two way ranging,TWR)的基础上再进行一次反向的TWR,来回就可以得到4个往返的时间,再根据TOF 测距计算得到2 个节点之间的距离,如图4所示。
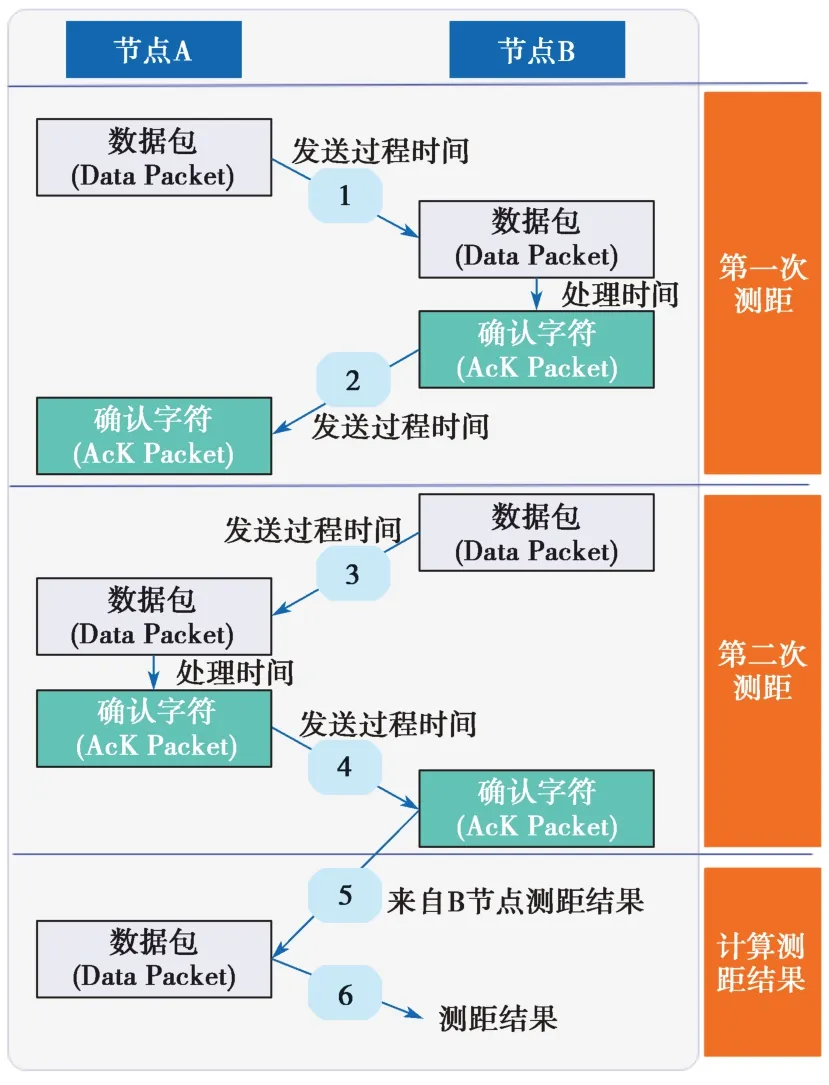
图4 SDS‐TWR 测距方式Fig. 4 SDS‐TWR ranging method
计算节点A 发出信息和接受信息的时间差TA,其包含信息往返时间Td和节点B 处理信息的时间TP,即TA=Td+TP。由于处理器执行指令的速度是确定的,故执行特定程序的时间是可以测试和评估的,即TP可以确定,进而可以计算出Td,再根据TOF 计算方法即可测得前后两车之间的距离。节点B 采用同样的方法完成第二轮测距。
SDS‐TWR运行时序如图5所示,以节点A作为主节点,一个完整的测距周期流程如下:
图5 测距周期时序Fig. 5 Ranging cycle timing
(1)第一轮测距
节点A向节点B发送测距请求,用序号1表示;
节点B 接收到信号后返回确认字符(acknowledge character,ACK)给节点A,用序号2 表示。
(2)第二轮测距
节点B向节点A发送测距请求,用序号3表示;
节点A 接收到信号后返回ACK 给节点B,用序号4表示。
(3)距离测算
节点B向节点A发送第二次的测算结果,用序号5表示;
测距完成,用序号6表示。
2.2 在轨道交通中的应用原理
该测距防撞系统在城市轨道交通中的应用场景(图6)可被简单描述为:本车运行前方同轨有车辆运行。
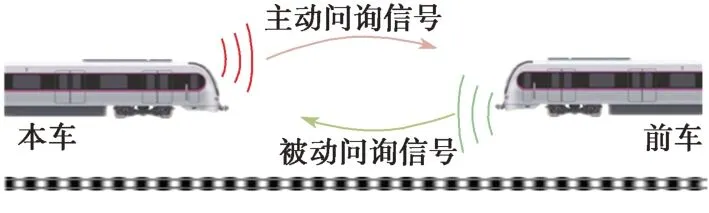
图6 城市轨道交通测距防撞系统工作原理Fig. 6 Working principle of the distance measurement and anti‐collision system in urban rail transit
根据SDS‐TWR 测距技术,本车前部(主节点)向前车发送主动测距信号;
前车尾部(从节点)设备收到主动询问信号后,经过信号鉴别和数据校核,向本车发送被动应答信号;
本车收到前车发射的被动应答信号若符合预定通信协议要求[6],则等待下一轮测距;
两轮测距结束后,双方即可获得对方的距离信息。在测距通信的过程中,唯一的节点ID 中包含有自身列车的信息,再依据双方车辆信息和距离信息,即可完成判定及预警。
本文所描述的测距系统旨在ATP意外发生故障的情况下,使用2.4 GHz 频段通信的方式来感知与前车的距离。通过本系统,车辆可以获得周边范围内所有车辆的状态信息,从而进行实时预警和制动等操作。在ATP正常的情况下,本系统可起到参考预警的功能,为列车行驶提供另一个层面的安全数据。
3.1 系统组成
车辆整套测距系统组成如图7 所示。车辆两头TC车内各有一套测距系统,运行在本车内的2.4 GHz 测距防撞系统实时监测本车前向的车辆。2.4 GHz测距系统(阴影部分)主要包括测距主设备、测距天线、射频识别(radio frequency identification,RFID)装置、显示预警终端/声光报警器等主要部件。主设备主要完成信号调理、预警处理、数据存储及通信接口等功能。显示预警终端和声光报警器主要完成信息显示、声光报警、系统设置等人机交互功能。测距天线通过无线连接方式与前车2.4 GHz 测距系统的测距天线进行信息交互,并给主机传输信息用于距离计算。RFID装置主要负责读取本车的轨道和位置等信息。

图7 车辆整套测距系统组成Fig.7 Composition of a vehicle ranging system
3.2 测距主设备组成
测距主设备主要由射频测距、数字IO、传感器、电源及接口等部分组成。
射频测距部分主要是由射频控制器和外部射频电路组成。其首先利用CSS技术将需要发送的数据进行调制,再将调制后的数据按照特定的频段进行发送;
然后将接受的数据进行解调并发送给处理单元进行处理。
数字IO部分主要用于是紧急制动以及声光报警。传感器部分主要用于故障诊断和当前速度的感知。
由于测距系统运行过程极其复杂,故本文对常见运行工况下的车辆情况进行简要梳理,并初步制定相应的应对策略。
4.1 车辆的识别方式
每列车可通过车辆以太网或者RFID 获取自身的状态信息(车次信息、线路信息及上下行信息等)并进行打包,在测距的同时交互双方信息,进而识别对方车辆。
4.2 车辆之间断开方式
当测距过程中由于信号原因出现单次掉线时,利用双方最近一次的速度和加速度信息进行距离预测并将预测值以不同的方式显示在预警界面上。
如果多次跟踪的某一车辆信息丢失,且最近一次测距距离已经到达测距的极限值位置附近(例如1 km),则认为该车辆已经远离探测视野并通过生命周期方式对其进行管理,直到在目标车队列中将其删除。
如果不处于测距的极限值位置附近,突然间信号消失的该车辆可能存在以下两种情况:
(1)如果该车辆与本车不是同线路车辆,且是调试或未编组或在站/在库停放的车辆,则认为该车辆已断电;
(2)如果该车辆与本车是在同一线路上,信号突然消失后则须立即进行报警处理,必要时进行制动减速。
如果所有的节点均在同时失去了通信链路,则认为本车测距节点已故障;
将最后一次的测距数据和预估的距离数据在终端上显示并报告设备故障。
4.3 车辆之间的常态通信内容
当本车发现对面的车辆后,两车之间可以通过ID号进行通信,通信的内容包含但不限于运行状态信息、速度及加速度等,以便关注本车外的其他车辆,从而进行预警评估。
4.4 不同车辆的处理方式
在行驶过程中,与本车建立连接的车辆可能包含同轨道、不同轨道、在库或在站停靠、检修或尚未编组未运行等状况的车辆。
4.4.1 同一轨道车辆
同一轨道的车辆是需要着重跟踪的车辆。正常情况下,该车辆与本车辆具有相同的线路号、上下行状态等信息。本车需要以不低于200 ms/帧的频次进行点到点测距和通信,获取对方车辆的速度、加速度等信息,在显示器上优先显示同轨道前车的距离状态及预警等级信息;
在获取允许制动信号的情况下,本车在必要时进行紧急制动,以避免两车发生碰撞。
4.4.2 其他轨道车辆
确定为其他轨道的车辆时,只需要在显示器上实时提醒驾驶员本车与对方车辆的信息,同时结合道岔数据进行判断:
(1)如果前方有道岔,则需要驾驶员提前输入进入道岔后新的线路号,依据新的线路号即可判断是否同轨;
(2)若无道岔或者不同轨,则不需要对该对方车辆进行预警。
4.4.3 未运行车辆
未运行车辆主要关注是否同轨,如果不同轨,按照4.4.2节处理;
如果同轨,则按照4.4.1节处理。
4.5 目标车队列的管理办法
在系统软件中建立一个同轨目标车管理队列,如图8所示。队列中每一个节点均是一个目标车信息。当发现新的车辆时,将车辆状态更新进目标车队列中,其队列中同时可以存放n个同轨目标车节点(根据需求确定n的数量)[7]。

图8 同轨车辆信息示意Fig. 8 Schematic diagram of vehicle information on the same track
每200 ms对目标车进行轮流测距,每个目标车节点设置一个生命周期,生命周期初始值为255。
每一次通信后都可获得范围内的所有列车信息并解析收到的信息:
(1)如果收到的列车信息不在目标车队列中,则增加进目标队列,生命周期初始化为255;
(2)如果收到的列车信息在目标队列中,则将该列车的生命周期继续更新为255;
(3)如果目标车队列中的列车信息没有出现在收到的信息中,则将该列车的生命周期减1,直至减为0后从目标队列中删除。
目标车队列首先按照距离值进行排序,同轨且距离值最小的排在队列最前面。
非同轨的列车建立n个节点的队列,其管理办法与上述一致,当整个队列中没有同轨目标车时,在预警显示界面上显示优先级最高的非同轨车辆的状态。
4.6 测距数据的清洗
通信过程中可能受到信号、干扰等因素的影响,进而导致一些数据出错。为了避免错误数据对整个系统预警的影响,需要对数据进行简单的逻辑判断和清洗:
(1)当数据帧的特征值(报文头、帧号、累加和等)不正确时,认为有误。
(2)根据城市轨道交通车辆的最大制动力、牵引力计算出一个速度变化范围,从而可以计算出每次测距时间间隔内的距离变化范围,进而判断数据的正确性。如按照城市轨道交通车辆两车最大相对速度240 km/h 计算,每0.2 s 测一帧,则数据距离变化应该小于13.4 m[8]。
(3)出现数据故障的时间若持续1 min,则认为是设备故障,需进行故障报警提醒。
4.7 预警状态切换
根据测得的距离数据,转换当前的预警状态(图9),具体如下:

图9 组件预警状态示意图Fig. 9 Schematic diagram of component warning status
(1)当距离d大于列车二级预警距离时,预警状态此时处于正常状态(无预警状态)[9],系统实时监测车距并显示距离数据。
(2)当d小于等于列车二级预警距离但大于列车一级预警距离时,预警状态调整为二级预警阶段,通过显示器将二级预警状态以及实时的距离信息显示在显示终端上,同时记录预警时间日志。
(3)当距离d小于等于列车一级预警距离时,预警状态调整为一级预警状态,显示器实时显示预警状态信息和距离值并进行急促声光报警。其中,一级预警状态不能直接跳转到无预警状态。
本文提供了一种在城市轨道交通领域中通过2.4 GHz通信频段实现测距的方法。其通过测算距离及时进行预警,协助驾驶员安全驾驶,可有效避免列车发生碰撞。该方法不仅可以提供日常运行的安全预警,还适用于城市轨道交通车辆的虚拟连挂,实现两列车或多列车在不通过机械件连接的情况下跟车行驶,且可以在运行过程中随时进行编组和解编。
此外,可将轨旁设备也接入本通信测距网络中,实现行驶的列车对周边全部设备的状态进行感知;
还可将本设备微型化配置给现场施工作业人员,实现人车之间的感知,有助于紧急情况下作业人员避险。