陈洪兴
(中国船舶集团有限公司 第七一五研究所,浙江 杭州 310023)
比例电磁阀一般可以分为两类,即无反馈型比例电磁阀和反馈型比例电磁阀。
反馈型比例阀是借鉴伺服阀的反馈控制发展而来。其反馈一般可以分为三类,即流量反馈、位移反馈和力反馈,其精度可以由反馈来调整。
对于无反馈型比例电磁阀,由于比例电磁阀的固有特性,在比例电磁阀死区附近,放大器的输入/输出存在明显的非线性性,且随比例电磁阀阀块温度的变化,阀块线圈内阻会产生变化,在比例阀放大器的输入控制值固定时,输出电流也会产生变化。
在比例阀放大器非线性控制算法的补偿控制策略等方面,不少研究人员都开展了研究。
张佳旭等人[1]研究的衰减式位置指令跳跃的补偿策略、PRATUMSUWAN P等人[2]研究的模糊控制策略、BESSA W M等人[3]研究的滑膜结构策略等,都是针对有阀芯位移传感器放大器的补偿策略,较好地解决了有阀芯位移反馈放大器的非线性控制问题。而在实际应用中,大量采用了无阀芯位移传感器的比例阀,如何处理无位移传感器的比例阀死区附近比例阀放大器的非线性问题,提高其控制性能,是比例阀控制领域面临的一个挑战[4]。
谢建等人[5]研究了死区问题及不同温度对电液比例阀控制性能的影响,对于死区问题,提出了定值补偿、变幅值补偿及信号提前切换补偿方法,以便于较快速通过死区,相对减小死区的不良影响;但没有根本上解决放大器输入/输出间的非线性关系,针对温度影响,该研究只是提出了电流反馈跟踪的控制方法,并没有与死区附近的非线性性联合考虑解决方案。胡瑢华等人[6]研究了流量与控制值的关系,利用MATLAB图像处理工具,对流量特性曲线进行了数据采样,根据采样值进行了拟合,得出了函数,在控制系统中利用逆函数进行了控制值补偿;但其函数的构造难度大,且影响流量因素较多。吴强等人[7]研究了放大器输入控制值与比例阀流量差的关系,利用流量差来补偿控制值,提出了无须位移反馈的线性死区补偿策略,通过试验发现了该策略虽然能够减小比例方向阀输出流量死区,但会出现流量提前饱和的问题。吉星宇等人[8]基于阀的进、出口压差和放大器输入电压信号的关系,设计了能够进行死区补偿的双线性插值补偿策略,利用双线性插值计算输出校正后的电压值代替放大器原输入电压值,以此来调节比例方向阀阀口开度,补偿死区,从而解决了由死区引起的非线性等问题;但其运算量较大,控制过程较复杂。SELMIC R R等人[9]采用神经网络方法,对未知死区进行了补偿,其采用了两个神经网络(一个用于估计死区参数,另一个神经网络提供自适应补偿),该方法极大提高了控制系统的复杂度。
以上各种研究都是停留在基于各类算法或系统的流量、压力等反馈对放大器输入值的补偿上,而对于放大器与比例阀组成的单元本身输入/输出的非线性性问题,未能根本地加以解决。
康永玲[10]提出了通过对控制器输出的脉宽调制信号(pulse width modulation,PWM)进行比例-积分-微分(proportion integration differentiation,PID)调节,以此来对输出电流进行实时跟踪的补偿方法,这种基于放大器内部电流输出采样反馈跟踪的比例-积分(proportion integration,PI)放大器,解决了比例阀导致的放大器输入/输出的非线性性问题,可以使输出电流与期望电流一致;但其阶跃响应时间需要0.8 s。
因此,这种电流实时跟踪补偿型放大器问题在于PID的参数整定较繁琐[11],容易存在电流过冲或电流建立缓慢的问题。
对于无阀芯位移等外置反馈的比例电磁阀,目前的放大器对该类比例阀阀芯位置控制都不太理想。
为此,笔者提出一种将期望电流输出值作为放大器的输入参数、预存匹配参数、电流跃变和跟踪分时进行的线性放大器实现方法,以解决无反馈型比例电磁阀放大器的输入/输出非线性问题,以及电流建立过缓和电流输出受温度影响的问题。
无阀芯位移反馈电磁比例阀及放大器组成的模块是液压控制系统的最基本组成单元,其稳定性及可控性决定了液压系统的性能及使用便利性。
目前常用的方法是:基于非线性放大器的控制补偿法,或采用基于电流反馈的比例-积分(PI)及其变种的数字型放大器。
PI放大器是通过内部电流反馈来调整激励电压(对应PWM波的脉宽)作用在比例电磁阀线圈上来实现对比例阀的阀芯位置的控制,但由于放大器输入值的阶跃变化不确定以及PID参数不够理想,通过PID调节后,PI放大器电流阶跃响应输出并不理想。
因此,为完成线性较好、高精度的放大器,必须有效地解决好电流反馈型线性放大器设计面临的以下3个问题:
(1)比例阀死区附近存在的放大器激励值(输入)-实际线圈电流(输出)间的非线性性;
(2)比例阀热量给线圈内阻产生的有害因素:放大器激励电压不变时,线圈内阻变化会影响输出电流大小;
(3)比例放大器内部利用纯电阻采样的比例阀电流平均值,与实际比例阀电流存在一定差异,且采样电流值滤波后存在一定的滞后性。
由于上述因素的存在,基于电流反馈PI跟踪型放大器及其变种都存在跨越死区的速度较慢现象,或存在着为了提高跨越死区的速度而引起电流的过冲的现象。
电流反馈跟踪的电流建立曲线如图1所示。
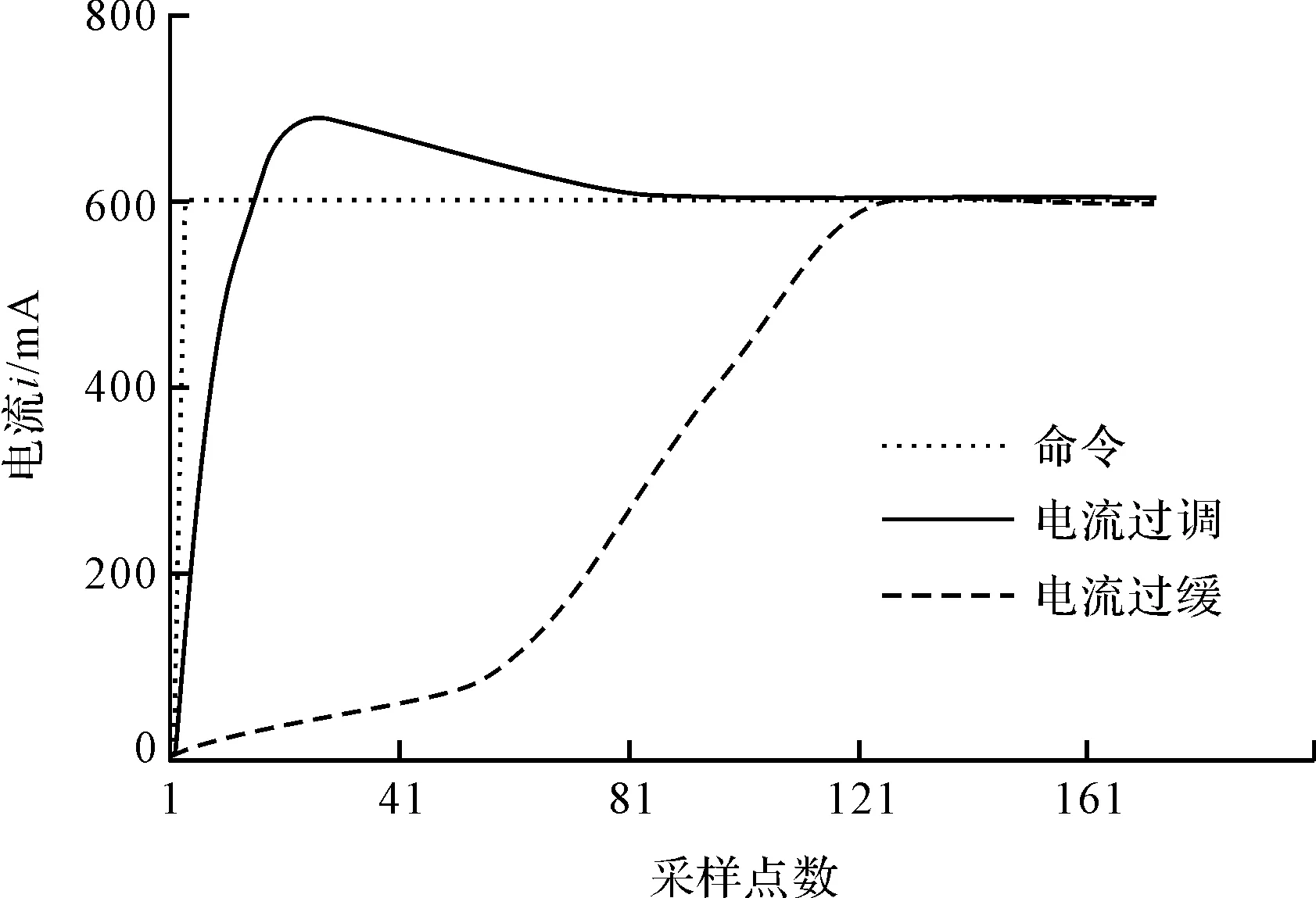
图1 电流反馈跟踪的电流建立曲线
根据Rexroth的模拟放大器模块手册Re30223[12],其给出的VT-MSPA1-x输出特性曲线如图2所示。
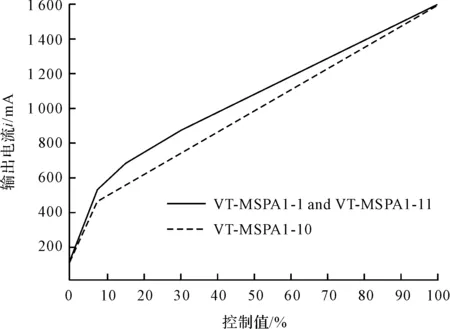
图2 VT-MSPA1-x放大器的输出特性曲线
图2表明:脉宽控制值输入与输出电流间是非线性的。
为使放大器的输入与输出间呈线性关系,笔者通过发明问题解决理论(theory of inventive problem solving,TRIZ)中冲突解决理论[13]对VT-MSPA1-x放大器以及电流反馈型放大器所面临的问题进行分析。
经过分析得到的发明原理解有:预操作、变换参数等。
根据这些发明原理解的指导,笔者对无外置反馈信号的电流跟踪型放大器进行了重新设计:将期望的输出电流值直接作为放大器的输入,而将图2(控制值-输出电流)的非线性关系形成逆向匹配表预置存储在放大器的存储器中。
因此,在放大器中,输入指令(期望输出电流值)通过查预置表的方式与控制值形成了一一对应的关系。
由于受PWM波频率、纯电阻采样等的影响,放大器纯电阻采集到的平均电流[14]与实际输出的有效电流存在差异。因此,还必须形成常温下的输出电流值-采样电流值的匹配表,同样预置存储在放大器的存储器中。放大器则根据输入指令所匹配的采样电流值进行跟踪,可以使输出电流与输入指令电流一致。
实现比例电磁阀数字型线性放大器的功能模块主要由通讯接口电路、基于现场可编程门阵列(FPGA)[15]的放大器控制电路模块、电流驱动电路、比例阀电流的采集及模拟滤波电路等组成。
其中,FPGA控制电路包括电流采样值的数字滤波模块、指令收发及解析模块、若干信号发生器模块、期望电流-控制量-采样电流对照存储模块、控制量调整模块、电流跟踪模块、PWM波产生模块、初始参数匹配模块、故障监测及处理模块等等。
电流驱动电路是PWM波经“反接卸荷式”功率驱动[16]的电路。
比例电磁阀数字型放大器的功能实现框图,如图3所示。

图3 比例电磁阀数字型放大器的功能实现框
放大器在工作时,针对所需驱动的比例电磁阀,上位机首先通过通讯接口初始化有关参数,将对应参数以及期望电流-控制量-采样电流匹配表下载到FPGA中;
放大器接收到电流阶跃变化指令后,根据对照表数据进行线性内插,得到指令电流所对应的控制量及跟踪电流参数值;
由于电流-控制量对照表是在常温下测得的参数,因此,笔者在图3所示的控制量调整模块中,根据当前实际控制量等参数,对本次期望控制量进行调整,以补偿比例电磁铁因温度引起的内阻变化,以及由此产生的控制量的差异。调整后的控制量数据经斜坡发生器模块后,在PWM波发生器模块中合成满足要求的PWM波信号。
电流采样电阻采集的输出电流信号经低通滤波处理、数字采样后,再在FPGA内进行数字滤波处理,电流采样值就存在一定的滞后。如果放大器在执行指令的电流跃变期间以有延时的采样值进行电流跟踪,则会出现输出电流过冲现象。
根据TRIZ解决物理冲突的“时间分离”原理,放大器在电流指令响应期间,跟踪器模块将暂不工作,以防止PWM波的实际控制量出现超调现象。
期望电流-控制量-采样电流对照表的产生方式是:为方便放大器与不同比例电磁阀的匹配,上位机首先按照比例电磁阀的线圈特性设置放大器的信号频率、颤振频率及颤振幅度等参数;然后FPGA中的初始参数匹配模块接到对应指令后,跟踪器设为无效,参数保持稳定后,采用万用表直接读取比例电磁阀(常温下)的电流有效值,通过FPGA中的综合参数模块将控制量、采样电流值回送给上位机[17]。
经过多组参数测量,形成期望电流-控制量-采样电流对照表。为保证精度,在死区附近应将测量步长减小。
放大器设计完成后,在工作过程中,根据期望电流指令所匹配的控制值使输出电流快速响应,根据期望电流所匹配的采样电流值进行闭环跟踪,保证输出电流的精度;当线圈内阻受温度的影响而改变时,通过跟踪器调节控制值使输出电流保持稳定,克服温度变化对比例阀线圈电流产生的影响,实现了期望电流与输出电流一致的线性放大器的功能。
按照期望电流-控制量-采样电流对照参数的产生方式,测定对应比例阀的匹配参数:上位机主控板根据对应的比例阀对放大器进行参数设定,如颤振频率等,然后放大器依序给出不同控制量参数值,电流稳定后,通过FPGA的仿真软件“Quartus Ⅱ”中“Signal Tap Ⅱ Logic Analyzer”功能模块进行电流采样值的采样显示,参数采样结果保存成“.txt”文件(后续图表中的参数数据都采用该方式获取)。
实际电流值通过万用表读出,对照参数表实际采集平台如图4所示。
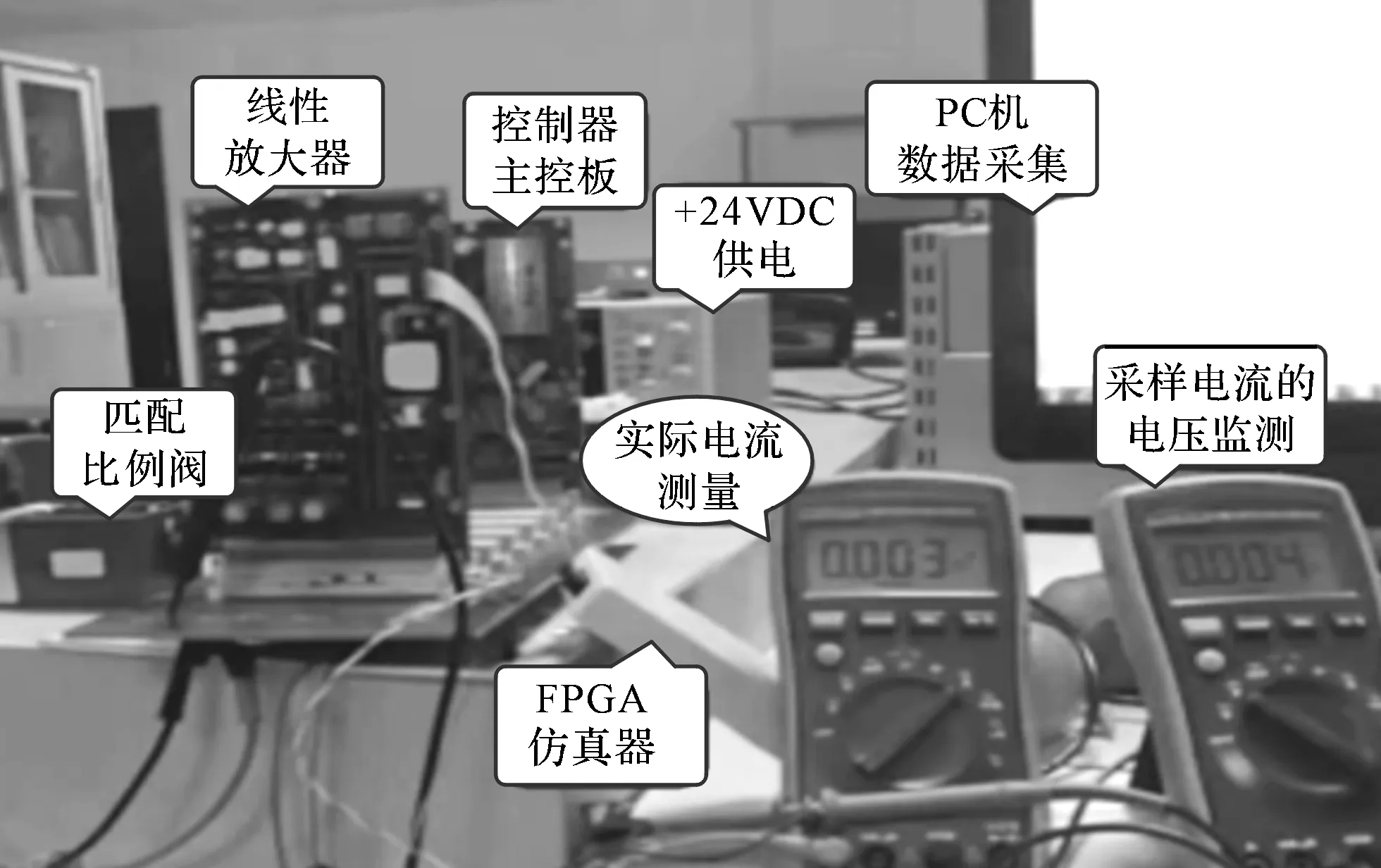
图4 对照参数表实际采集平台
图4平台中,线性放大器使用了嵌入式可编程控制器(PLC)功能模块板中的1个放大器通道。
该功能模块板包含有3通道的线性放大器、7通道的4 mA~20 mA采集、8通道的0/+24 V开关量输入采集、1通道±10 V模拟量采集、6通道的50 W开关阀输出、2通道±10 V模拟量输出、1通道4 mA~20 mA输出。
控制器主控板的主控芯片为用户提供了液压系统流程控制的编程环境。
主控板与功能模块板之间通过母板连接,数据交换通过网络或总线进行。
力士乐公司比例溢流阀(型号:0811402016)在给定颤振频率及颤振幅度、信号频率下的+24 V供电时,测定了其输出电流与控制量、跟踪电流采样值间的对应匹配参数值。
该比例阀的电流-控制-跟踪参数曲线如图5所示。

图5 比例阀的电流-控制-跟踪参数曲线图
在图5中,控制参数(控制量)代表放大器输出某电流时,用于控制PWM信号的实际占空比的数值;跟踪参数代表放大器输出某电流时,跟踪器的跟踪目标值,参数非实际物理量,无单位。
在产生含有颤振频率的PWM波形时,应注意:在整个有效范围内跟踪电流不应出现跃变或拐点。
针对不同的比例阀,笔者采用不同的期望电流-控制量-跟踪电流的对照参数,上位机给出期望电流指令后,测量了实际输出的电流,并对实测电流进行了线性拟合以及给出了拟合公式。
力士乐公司比例溢流阀(型号:0811402016)期望电流与实测电流曲线,如图6所示。

图6 力士乐公司比例溢流阀(型号:0811402016)期望电流与实测电流曲线
力士乐公司比例溢流阀(型号:0811404832)期望电流与实测电流曲线,如图7所示。

图7 力士乐公司比例溢流阀(型号:0811404832)期望电流与实测电流曲线
由图(6,7)的线性拟合曲线可知:期望电流与实际万用表测量的电流有效值输出结果一致性及线性度较好,受线圈温度影响可以忽略,图6的线性度误差小于1%,图7的线性度误差小于1.5%。通过精确测量比例电磁阀的期望电流-控制量-采样电流值的对照表,放大器可以使控制系统对比例电磁阀的电流输出控制更加精准,线性度更优。
放大器对不同的比例阀电流从0跃过死区到阶跃电流稳定时的建立过程进行了测试。
力士乐公司比例溢流阀(型号:0811402016)的电流跃死区-时间曲线如图8所示。
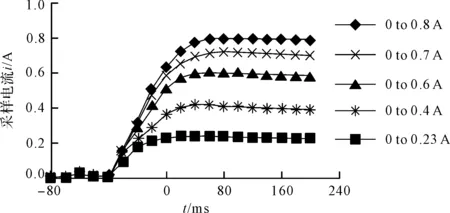
图8 力士乐公司比例溢流阀(型号:0811402016)的电流跃死区-时间曲线
力士乐公司比例溢流阀(型号:0811404832)的电流跃死区-时间曲线如图9所示。

图9 力士乐公司比例溢流阀(型号:0811404832)的电流跃死区-时间曲线
在图(8,9)中,为便于测量,无斜率要求,电流值采样时用10 μF的电容进行了低通模拟滤波处理,采样后数值进行了数字滤波处理,因此电流采样值和实际电流稳态建立时间存在一定的时延。
由图(8,9)可以知道:不同的比例电磁阀电流输出由0到达电流期望值所需的时间都基本相同,无过冲,响应时间小于0.1 s。
在无斜率要求下,笔者对比例阀输出电流阶跃变化时进行了输出响应时间的测试。
力士乐公司比例溢流阀(型号:0811404832)的电流-时间曲线如图10所示。

图10 力士乐公司比例溢流阀(型号:0811404832)的电流-时间曲线
通过图10可知:电流指令给出到电流稳定输出所需的时间相同,一致性较好。
由图(8~10)可以得知:放大器电流阶跃变化的稳态电流建立时间基本一致的。
笔者将放大器应用于液压驱动的缆绳收放控制系统实际工程中,通过测量出比例阀的死区电流值,上位机控制系统将该电流值作为死区补偿的偏移量,就可以直接跨越死区,实现了对比例阀的开环控制,明显提高了系统的可控性。
由于放大器的信号频率、颤振频率、颤振幅度均可调,能够较为方便地产生各类所需要的PWM波,满足对不同比例电磁阀的控制。
该放大器的控制逻辑集成在FPGA中,实现了模块化设计,在一片FPGA中可以集成多个放大器控制模块,大大减少液压系统放大器的数量。
由于比例阀磁滞现象的存在,在电流上升和下降过程中,相同的期望电流所对应的控制量存在一定的差异,因此,期望电流-控制量匹配表可以区分为上升段、下降段2张匹配表,便于对比例阀的控制更精确。
在TRIZ冲突解决理论发明原理解的指导下,笔者采用预存匹配参数表、电流跃变时跟踪不工作的方法,解决了无外置反馈信号的比例电磁阀的死区所引起的放大器输入/输出的非线性问题,以及阀块温度引起的输出电流变化问题、电流采样值有时延的问题;在FPGA中,实现了数字型线性放大器的控制功能模块;通过对不同的比例阀进行了匹配表参数的测定、放大器静态性能的测试,以及实际工程应用,验证了数字型线性放大器实现方法的合理有效性。
研究结论如下:
(1)采用该方法实现的数字型线性放大器电流阶跃变化响应速度快、电流输出准确、线性度好,克服了温度变化带来的影响,提高了液压系统的稳定性,可以在液压系统中进行工程应用;
(2)放大器在初始化后才建立与比例阀的匹配关系,便于控制系统硬件的重构和复用;
(3)该数字式放大器可以通过网络与上位机实时进行状态信息和指令交互,可以实现对远程无人系统液压比例阀的精确控制。
当阀芯堵塞、摩擦力异常等因素存在时,保持电流跟踪所需的控制值与匹配控制值的差值可能会超出一定的范围,因此,在下一步的研究工作中,笔者定量研究其规律,以便可以据此在线预报液压系统的故障。
猜你喜欢 电流值电磁阀线性 渐近线性Klein-Gordon-Maxwell系统正解的存在性数学物理学报(2022年4期)2022-08-22基于ANSYS Maxwell的比例电磁阀隔磁环仿真分析与优化军民两用技术与产品(2022年4期)2022-06-28低速机电控喷油器电磁阀换热特性计算舰船科学技术(2022年10期)2022-06-17制冷剂与润滑油混合物对空调器泄漏电流影响分析及研究日用电器(2022年4期)2022-05-26放疗中CT管电流值对放疗胸部患者勾画靶区的影响现代仪器与医疗(2021年6期)2022-01-18线性回归方程的求解与应用中学生数理化·高一版(2021年2期)2021-03-19变压器差动斜率保护计算方法大众科学·上旬(2020年2期)2020-03-30福特6F35变速器的电磁阀控制策略汽车与驾驶维修(维修版)(2019年3期)2019-05-08二阶线性微分方程的解法中央民族大学学报(自然科学版)(2018年3期)2018-11-09光伏发电系统谐波监测与评估研究农业科技与装备(2016年5期)2016-08-15