裴 勉,张福杰,张国庆,梅 波,赖旬阳,徐 杰
(1.国网浙江省电力有限公司德清县供电公司,浙江 德清 313200;
2.三峡大学 电气与新能源学院,湖北 宜昌 443000)
近年来,带电作业已成为电网设备检测和检修等的重要方法之一,其能避免电能损失与提高电力系统经济效益,保证电力系统可靠运行[1-7]。随着用电负荷增长,电网容量也需要增加,从而需要频繁开展带电组立新砼杆作业来为新增用户接入电源,同时对之前的老旧和设计不合理配电线路进行运维检修时,也常采用组立新砼杆来解决线路老化造成的弧垂大等问题[8-11]。带电组立新砼杆作业中,一般使用吊车和绝缘斗臂车来配合完成。装配有横担的新立砼杆要被起吊并规避既有带电导线,需要实时监测和调整杆头横担与导线的距离和角度。传统通过人工监测和旋转砼杆的调整方式,需多次尝试才能调整到位,既费力又不安全。
文献[8]针对线路两端过大高势差导致的压担问题,经带电新立电杆消除了安全隐患。文献[9]阐述了10 kV 带电组立新电杆的具体作业流程和步骤,为开展带电组立电杆作业提供参考依据和操作规范。文献[10]通过优化带电立杆作业流程及各步骤用时,有效减少砼杆下落用时。文献[11]对10 kV配网架空线路带电立杆作业中,设计一种新工具来校正杆头位置,不过仍然采用人工去判别横担与线路之间的角度。上述文献对带电立杆作业流程和步骤进行了梳理和优化,但没有从空间关系上对支撑横担、杆头与带电导线位置和距离、角度进行研究和应用。
对于三维空间物体的定位和空间角度测量的方法有很多,如采用激光跟踪仪、全站仪、激光雷达和计算机视觉三维定位等方法,对空间物体关键点进行实时动态定位[12-17]。各测量系统均有自身的独特优势和不足,应根据测量任务的需求选择合适的方法。RTK(Real-time kinematic,实时动态)技术是一种新的常用GPS测量方法,它采用载波相位动态实时差分方法,实时测量观测点的三维坐标,且达到厘米级精度,被广泛应用到定位导航、工程测量等领域,在输电线路工程领域也有所应用,如采用GPS-RTK技术实现架空输电导线的舞动、风偏,电线塔杆倾斜程度等状态的实时监测[14,16-17]。相比上述所提的空间点定位方法,GPSRTK 技术具备测量效率高、操作方便、设备安装灵活、不受空间环境影响,测点与测点以及测点与基站之间无需通视等特点。将GPS-RTK 技术引入带电立杆作业中,解决空间运动目标的实时动态监测。
砼杆固定和导线安装时,为控制横担与导线距离、角度在允许范围内,本文提出一种基于GPS-RTK技术和空间角度实时计算与管理的砼杆调整装置,在带电组立砼杆作业中能够快速准确地完成砼杆调整。
带电组立新砼杆作业过程中,如何确保支撑横担、杆头与带电导线具有安全的作业距离,及夯实杆根前确保支撑横担与带电导线垂直,是作业的关键步骤。本文基于GPS-RTK 技术设计基于空间角度实时监测的砼杆抱箍调整工具,使用该装置能够快速准确地完成支撑横担、杆头与带电导线的定位,以及实时监测支撑横担、杆头与带电导线的空间距离,并建立支撑横担和带电导线的空间模型,实时快速计算支撑横担与带电导线的空间夹角,完成砼杆的快速调整。
现场作业中,使用吊车吊起装配有横担的新立砼杆,在绝缘斗臂车的配合下,来完成带电组立新砼杆。依据上述需要完成的两个关键步骤,设计了基于空间角度实时监测的砼杆抱箍调整工具:首先新立砼杆规避并穿越既有带电导线,穿越时需要实时监测和调整杆头横担与导线的距离和穿越角度;
然后在新立砼杆夯实固定和导线安装时,需要使横担与导线角度接近垂直。
基于空间角度实时监测的砼杆抱箍调整工具总设计如图1所示,包括基于GPS-RTK高精度空间坐标检测模块、近距离通信模块和砼杆抱箍调整管理模块。
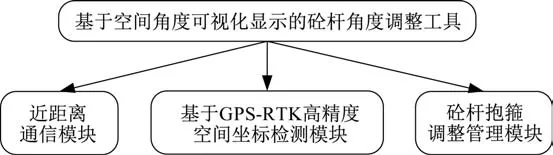
图1 基于空间角度实时监测的砼杆抱箍调整工具设计框图Fig.1 Design block diagram of concrete rod hoop adjustment tool based on real-time monitoring of spatial angle
依据作业的流程及技术要求,设计基于空间角度实时监测的砼杆抱箍调整工具。工具的3个模块即基于GPS-RTK高精度空间坐标检测模块、近距离通信模块和砼杆抱箍调整管理模块的详细功能和方案设计及相互关系如图2所示。

图2 3个模块之间的相互关系Fig.2 Diagram of the relationship between the three modules
基于GPS-RTK高精度空间坐标检测模块主要由4个RTK 标签位构成:包括1 个固定基站标签位和3 个移动站标签位;
这些标签位根据现场作业需求,安放在合适的位置,用于实时获取所在点的空间位置坐标信息。4个独立设置的RTK标签位通过近距离通信模块进行信息共享和交互。近距离通信模块通过无线网络将数据传输至砼杆抱箍调整管理模块的智能芯片MCU,MCU 再对获得的数据进行实时处理,计算出支撑横担、杆头与带电导线的空间位置和所夹的角度;
然后通过人机交互,对带电组立新砼杆作业的关键步骤进行实时管理:实时监测和调整新立砼杆杆头横担与导线的距离和穿越角度,确保砼杆安全穿越既有带电导线;
通过交互快速调整横担与导线角度接近垂直等。
2.1 空间位置定位技术
支撑横担、杆头与带电导线的空间位置主要基于GPS-RTK(Real-time kinematic,实时动态)技术,由空间坐标检测模块来实现。RTK实时动态技术通过把基站的载波相位发给用户移动站,求差获得空间坐标。相位观测到4 颗及其以上数量卫星值,以及通过建立合适的空间模型,GPS-RTK用户移动站实时定位精度可达厘米级,其定位原理如图3所示。

图3 GPS-RTK定位原理Fig.3 GPS-RTK positioning principle
2.2 导线和横担空间模型的建立
空间坐标检测模块中设置4 个RTK 标签位:RTK基站标签位固定于导线正下方;
3 个RTK 移动站标签位其中的1 个也需放置在导线正下方,但与基站标签位相隔一定距离,并且其与导线的垂直高度应和基站标签位距离导线的垂直高度保持一致;
其它2 个RTK移动站标签位放置在与横担平行的抱箍操作杆两端,用于确定横担方向。从而在空间直角坐标系中,构建空间模型如图4所示。
图4中RTK基站标签位所在空间点G与一个移动站标签所在空间点U1距离导线的垂直距离均为h,且均位于导线正下方,从而使基站标签位与移动站标签位所确定的直线GU1与导线所在的空间方向一致,从而确定了导线空间方向,在带电组立新砼杆过程中G、U1的坐标固定不变。

图4 导线和横担所在空间直角坐标系Fig.4 Rectangular coordinate system of the space where the wire and the cross-arm are located
两个RTK 移动站标签位位于砼杆调整装置中与横担平行的操作杆两端,所构成的直线U2U3与横担平行,从而确定横担的空间方向。在带电组立新砼杆过程中,U2、U3的坐标随砼杆的移动而不断变化。
通过GPS-RTK高精度空间坐标检测模块,得到各空间点在坐标系O-XYZ中的坐标为:G(xG,yG,zG);
U1(x1,y1,z1);
U2(x2,y2,z2);
U3(x3,y3,z3)。
在O-XYZ坐标系中,直线GU1为导线所在的空间方向,将GU1平移使点G与O重合,得到OA,即直线OA也为导线的空间方向。A点的坐标为(x1-xG,y1-yG,z1-zG),可得:

直线U2U3为横担所在的空间方向,将直线U2U3平移得到OB,即直线OB也为横担的空间方向。B点坐标为(x3-x2,y3-y2,z3-z2),可得:

根据A、B两点的坐标,则有:

直线GU1和直线U2U3所形成的空间角度为横担与导线的空间夹角,∠AOB的大小即为导线与横担的空间夹角,将式(1)、式(2)、式(3)代入,依据下面公式即可求得导线与横担的空间夹角θ:

基于前述理论研究设计作业工具1 套,如图5所示。

图5 基于GPS-RTK技术的带电立杆作业新型砼杆调整装置及测试试验Fig.5 A new concrete pole adjusting device for live pole erection and test based on GPS-RTK technology
依据作业现场状况和技术要求,基于空间角度实时监测的砼杆抱箍调整工具,GPS-RTK固定基站和移动站将数据通过无线网络传输至砼杆抱箍调整管理模块,计算横担与导线方向夹角,并在交互管理中显示各点坐标和夹角大小。当操作人员调整砼杆至一定角度后,砼杆抱箍调整管理模块中交互管理设备显示基于GPS-RTK及空间建模所检测到的实时角度;
然后依据该检测角度的大小,分别指示操作人员实施相应的操作处理。带电组立新砼杆作业详细流程分解如下:
1)在地面安装好支撑横担等,并进行绝缘遮蔽。
2)将抱箍等砼杆调整装置固定在砼杆适当高度位置,并使操作杆与支撑横担平行;
将两个RTK 移动基站放置在操作杆的两端确定位置。
3)将GPS-RTK 固定基站和一个移动站沿既有导线方向,且与导线垂直距离相等(海拔高度相同)的位置进行放置。
4)通过起吊设备将砼杆越过带电导线,对准下方杆洞。
5)操作人员在交互管理提示下通过抱箍操作杆来旋转砼杆:当夹角小于45°时,交互管理中报警灯闪烁亮起;
当夹角介于45°~75°之间时,交互管理中红色指示灯亮起,可用力旋转砼杆;
当夹角介于75°~85°之间时,交互管理中黄色指示灯亮起,可缓慢旋转砼杆;
当夹角介于85°~90°之间时,交互管理中绿色指示灯亮起,缓慢旋转砼杆的同时留意角度值,当角度显示到90°±1°时可停止旋转砼杆,调整到位。
6)夯实砼杆根部,将导线固定后,砼杆调整装置拆卸回收。
本文提出的基于空间角度电子监测的砼杆抱箍调整工具,采用GPS-RTK技术实时精确地检测横担与导线的夹角,并通过交互管理砼杆的调整角度,能有效解决带电组立新砼杆通过人工方式费时费力以及不安全等问题。与传统的作业方法相比,采用该装置辅助作业具有精确性高、安全性高、以及人机交互强等优点。
猜你喜欢 导线基站标签 铝棒导线在汽车线束领域的应用汽车电器(2021年4期)2021-05-07东华大学研发出可体内吸收型蚕丝导线纺织科学研究(2021年1期)2021-03-19单导线防震锤复位装置方案设计云南化工(2020年11期)2021-01-14500kV 紧凑型线路导线脱冰跳跃计算分析机电信息(2020年36期)2020-12-29无惧标签 Alfa Romeo Giulia 200HP车迷(2018年11期)2018-08-30不害怕撕掉标签的人,都活出了真正的漂亮海峡姐妹(2018年3期)2018-05-09基于移动通信基站建设自动化探讨电子制作(2017年8期)2017-06-05可恶的“伪基站”探索科学(2017年4期)2017-05-04基于GSM基站ID的高速公路路径识别系统中国交通信息化(2016年8期)2016-06-06让衣柜摆脱“杂乱无章”的标签Coco薇(2015年11期)2015-11-09